
Quel point commun y a t-il entre un pont suspendu, l’ancre d’un bateau et une clôture de sécurité ? Ce lien c’est la chainette ou caténaire : le nom de la courbe que dessine un fil tendu entre deux extrémités. Comme Galilée en fit la remarque, la chainette ressemble à une simple parabole mais s’en distingue.
1. Énoncé
Mettons nous dans la peau d’un gardien souhaitant bloquer efficacement un passage. Il dispose pour cela de deux poteaux immobiles dont il connait l’espacement  et la hauteur
et la hauteur  . Il voudrait délimiter une cloture au moyen d’une chaine comme sur le schéma ci-dessous :
. Il voudrait délimiter une cloture au moyen d’une chaine comme sur le schéma ci-dessous :

Vigilant, notre vigile procède à tâtons. Il commence par utiliser une chaine relativement longue, mais s’aperçoit vite qu’elle ne convient pas : la clôture s’approche en effet trop près du sol et il suffit de l’enjamber pour la franchir. Mais à l’inverse, lorsqu’il en utilise une plus courte, il remarque qu’elle ne descend plus assez cette fois. C’est maintenant par dessous qu’il imagine sans mal des intrus pouvoir se glisser.
À l’issue de ces essais, il en conclut que la chaine optimale est celle pour laquelle la profondeur du creux, appelée aussi flèche et notée  , arrive exactement à mi-hauteur des poteaux. Quelle dimension exacte de chaine
, arrive exactement à mi-hauteur des poteaux. Quelle dimension exacte de chaine  notre gardien doit utiliser pour parvenir à ses fins ?
notre gardien doit utiliser pour parvenir à ses fins ?
2. La Courbe de la Chainette
La solution est assez simple à approcher en pratique : il suffit de partir d’une corde volontairement trop longue puis de progressivement la faire glisser jusqu’à ce que le creux esquissé atteigne le niveau désiré.
Le calcul précis n’est toutefois pas aussi aisé que cela et, notamment, sa solution n’a pas de forme fermée. Eh oui, comme pour de nombreux problèmes réels, cela signifie qu’il faudra en passer par des approximations numériques.
a) Bilan infinitésimal des forces
Pour commencer, nous allons nous plonger dans un peu de physique pour décrire l’équation du caténaire, qui est la forme prise par une chaine inélastique et homogène au repos lorsqu’elle est tendue entre deux points et soumise à son poids.
Nous réalisons pour ce faire un bilan des forces sur un élément infinitésimal de la corde. Le principe fondamental de la dynamique indique qu’à l’équilibre la somme des forces exercées sur ce morceau doit se compenser :
![\[\sum \mathbf{F} = \mathbf{0}\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-3df720e5fd10dd459c23351a3534e65d_l3.png "Rendered by QuickLaTeX.com")
En faisant l’hypothèse que la corde est homogène, sa masse est uniformément répartie permettant d’écrire que  . Par conséquent dans un champ de pesanteur uniforme, le poids s’exprime :
. Par conséquent dans un champ de pesanteur uniforme, le poids s’exprime :
![\[\mathbf{P} = - \mu \mathrm{g} \, \mathrm{d}s \, \mathbf{u}_z\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-40bc69feea269964e52913c6c1eb9a6b_l3.png "Rendered by QuickLaTeX.com")
En utilisant la non rigidité, on arrive finalement à :
![\[\frac{dy}{dx} = \frac{\mu g}{T_0} s = \frac{s}{a}\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-ffc2b92867ab7ffa198844c79ebdb5cc_l3.png "Rendered by QuickLaTeX.com")
en posant  .
.
Or, l’abscisse curviligne  peut également être exprimée comme :
peut également être exprimée comme :
![\[s = \int_{}^{} \, \sqrt{1 + \left( \frac{dy}{dx} \right)^2} \mathrm{d}x \]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-f5dacba2a384e2888a263abcb91c5917_l3.png "Rendered by QuickLaTeX.com")
On peut en déduire une équation différentielle sur  d’ou en découle sa forme.
d’ou en découle sa forme.
b) Équation de la chainette
Il en résulte que l’équation de la chainette est la suivante :
(1) ![\[y (x)= a \cosh\left(\frac{x}{a}\right) + C \]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-2f8b3567e100b0e3c22cf2cd61b9c454_l3.png "Rendered by QuickLaTeX.com")
où :
 est un paramètre caractérisant l’« aplatissement » de la chainette
est un paramètre caractérisant l’« aplatissement » de la chainette

Lorsque augmente, on a une chainette plus tendue, tandis que pour des valeurs faibles elle marquera un creux relativement plus important.
 est une constante dépendant du choix de repère
est une constante dépendant du choix de repère
Comme pour la position de l’axe des ordonnées, il est possible d’adapter le repère pour avoir  . C’est ce que nous allons faire pour le reste des calculs de sorte à simplifier l’expression de .
. C’est ce que nous allons faire pour le reste des calculs de sorte à simplifier l’expression de .
Il est remarquable que même si la masse linéique apparait dans la définition du paramètre d’aplatissement , la forme du caténaire est indépendante de la nature du matériau sous les hypothèses considérées : ce sont les points de fixation qui la déterminent.
En pratique, nous pouvons appliquer notre étude à une large gamme de cas : chaine de pendentif, fil de corde, câble libre…
3. Mise en équation
Maintenant que nous avons établi l’équation du caténaire, nous allons pouvoir en déduire les équations que doivent vérifier les autres paramètres.
a) Expression de la flèche :
On dérive de l’équation du caténaire :
![\[f= y \left( d \right) - y \left( 0 \right) = a \cosh\left(\frac{d}{a}\right) -a \]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-b97cec90dac30deedb8a3fd777a8e313_l3.png "Rendered by QuickLaTeX.com")
ou encore :
(2) ![\[f = a \left[ \cosh\left(\frac{d}{a}\right) -1\right] \]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-67a18f0497e7ade85e8a571859dfd22f_l3.png "Rendered by QuickLaTeX.com")
b) Expression de la longueur du caténaire
En calcul différentiel, l’expression générale de la longueur d’une courbe est fournie par l’intégration de son abscisse curviligne :
![\[L = \int_{-d}^{d} \, \mathrm{d}s = s(d) - s(-d)\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-00c567c6aeb26fa338e7f4d949f78487_l3.png "Rendered by QuickLaTeX.com")
Or, d’après le bilan des forces, le caténaire se caractérise justement par une abscisse curviligne réalisant :
![\[ s = a \frac{dy}{dx} \]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-f1ff349774b9d434970a5c2197913e0c_l3.png "Rendered by QuickLaTeX.com")
On peut donc retrouver l’expression de par dérivation de :
![\[s (x) = a \sinh\left(\frac{x}{a}\right)\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-71944fb95349fe42e0316ef7035e854c_l3.png "Rendered by QuickLaTeX.com")
Enfin, avec l’imparité de  , on obtient l’expression de :
, on obtient l’expression de :
(3) ![\[L = 2a \sinh\left(\frac{d}{a}\right) \]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-5af7b11373687355a01f08d9749d43f9_l3.png "Rendered by QuickLaTeX.com")
c) Équation sur la flèche
Jusque là, les équations sont valides quelles que soient la hauteur de la flèche et la longueur de corde. Nous allons exprimer la condition recherchée par le gardien, c’est à dire que la base du creux doit se situer à soit à mi-hauteur :
![\[f = \frac{H}{2}\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-39d548e054772eca9f952cfc525b18e9_l3.png "Rendered by QuickLaTeX.com")
ce qui nous donne avec l’équation  :
:
![\[\frac{H}{2} =a \left[ \cosh \left( \frac{d}{a} \right) -1 \right] \]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-385561cea43b06224da7fc1594b5c0c7_l3.png "Rendered by QuickLaTeX.com")
L’astuce est de diviser chaque membre par  . Le membre de gauche devient alors :
. Le membre de gauche devient alors :
![\[ \frac{H}{2d} = \frac{H}{D}\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-add9c5241fd53451faa61f080d14ac75_l3.png "Rendered by QuickLaTeX.com")
tandis que le membre de droite devient :
![\[\frac{a}{d} \left[ \cosh\left(\frac{d}{a}\right) -1 \right] = \frac{ \cosh\left(\frac{d}{a}\right) -1}{\frac{d}{a}} \]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-91ec8e86f6867d7c589cf909c7b6542f_l3.png "Rendered by QuickLaTeX.com")
Ainsi, en introduisant les deux paramètres pratiques de dimensionnement :
![\[ \rho = \frac{H}{D} \text{ , } x_\rho = \frac{d}{a}\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-da68056ca7c0fb769a4627f0141a1768_l3.png "Rendered by QuickLaTeX.com")
l’équation sur le niveau de la flèche peut se réécrire de façon condensée :
(4) ![\[\rho = \frac{ \cosh\left(x_\rho \right) -1}{x_\rho} \]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-6b8528203d832b28e7583f3a5b91841f_l3.png "Rendered by QuickLaTeX.com")
Le paramètre  introduit un dimensionnement caractéristique du problème. Il évalue la hauteur relative des poteaux par rapport à leur espacement. Des valeurs de faibles caractérisent des situations ou les poteaux sont relativement éloignés par rapport à leur hauteur, tandis que des valeurs de fortes décriront des cas ou la hauteur des poteaux est grande relativement à la distance les séparant.
introduit un dimensionnement caractéristique du problème. Il évalue la hauteur relative des poteaux par rapport à leur espacement. Des valeurs de faibles caractérisent des situations ou les poteaux sont relativement éloignés par rapport à leur hauteur, tandis que des valeurs de fortes décriront des cas ou la hauteur des poteaux est grande relativement à la distance les séparant.
 faible
faible 3. Calcul de la Longueur du Caténaire
a) Approche de résolution
La formule que nous venons d’établir invite à introduire la fonction  :
:
![\[\phi (x) = \frac{ \cosh\left(x \right) -1}{x}\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-a2e3612cc7d5b54893ab519052c3df33_l3.png "Rendered by QuickLaTeX.com")
L’équation  se condense ainsi en
se condense ainsi en  . On va établir l’existence et l’unicité de la solution à cette équation :
. On va établir l’existence et l’unicité de la solution à cette équation :
![\[\forall \rho > 0, \; \exists ! x_\rho > 0 \text{ tel que : } \phi(x_\rho) = \rho\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-90b28b32ac49aec8cb5c48f5f2ca451b_l3.png "Rendered by QuickLaTeX.com")
Démonstration : La fonction est définie sur  mais admet un prolongement
mais admet un prolongement  en 0 comme le montre son développement limité à l’orde 1.
en 0 comme le montre son développement limité à l’orde 1.
En effet, puisque :
![\[\cosh (x) = 1 + \frac{x^2}{2} + \underset{x \to 0}{o(x^2)}\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-5dd83851259f8d3dc3f8e47359efbf12_l3.png "Rendered by QuickLaTeX.com")
on a :
![\[\phi (x) = \frac{ \cosh\left(x \right) -1}{x} = \frac{x}{2} + \underset{x \to 0}{o(x)}\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-5b9ce3026589f2c6b6162105da3fab37_l3.png "Rendered by QuickLaTeX.com")
De plus, la fonction est dérivable sur  et :
et :
![\[\phi' (x) = \frac{ x\sinh (x) -( \cosh(x) - 1) }{x^2} = \frac{ N(x) }{x^2}\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-ff6afbf803260094c080172589ac5de5_l3.png "Rendered by QuickLaTeX.com")
Le signe de  n’est pas évident, on va donc poursuivre en étudiant les variations du numérateur
n’est pas évident, on va donc poursuivre en étudiant les variations du numérateur  introduit ci-dessus.
introduit ci-dessus.
La fonction est également dérivable sur  avec :
avec :
![\[N' (x) = x \cosh(x) \geq 0\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-6a6ac1a1f57174ad81fcc23b62dcb411_l3.png "Rendered by QuickLaTeX.com")
Par conséquent, la fonction est strictement croissante avec  . Donc, pour tout
. Donc, pour tout  ,
,  . Finalement, est strictement croissante avec
. Finalement, est strictement croissante avec  et
et  .
.
La fonction réalise ainsi une bijection de sur lui-même, impliquant que pour tout  , l’équation
, l’équation  n’admet qu’une seule solution :
n’admet qu’une seule solution :  (la notation cherche à insister sur la dépendance à ).
(la notation cherche à insister sur la dépendance à ).
Le paramètre  est ainsi déterminé de manière univoque par bien qu’il ne puisse être explicité plus directement car
est ainsi déterminé de manière univoque par bien qu’il ne puisse être explicité plus directement car  , la réciproque de la fonction , n’a pas de forme fermée. Nous pouvons toutefois l’estimer avec Python :
, la réciproque de la fonction , n’a pas de forme fermée. Nous pouvons toutefois l’estimer avec Python :
<pre><code class="language-python">
import numpy as np
from scipy.optimize import fsolve
def equation(x, rho):
return (np.cosh(x) - 1)/x - rho
def calculate_x(rho_values):
results = []
for rho in rho_values:
l = fsolve(equation, x0=1, args=(rho))[0]
results.append(l)
return results
</code></pre>Il s’en suit que  peut être aussi estimé et finalement . Nous allons plutôt exprimer ce dernier paramètre avec seul grâce à une astuce :
peut être aussi estimé et finalement . Nous allons plutôt exprimer ce dernier paramètre avec seul grâce à une astuce :
![\[L = 2a \sinh\left(\frac{d}{a}\right) = 2 d \frac{a}{d} \sinh\left(\frac{d}{a}\right) \]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-6b2ac0c01d3f4361b85893706b007bcd_l3.png "Rendered by QuickLaTeX.com")
(5) ![\[L = D \frac{\sinh (x_\rho )}{x_\rho} \]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-1f3965a64e2beb30ac69d0aaadd7664c_l3.png "Rendered by QuickLaTeX.com")
b) Analyse de graphe
Cette forme revêt une signification physique intéressante : elle exprime à partir de  et d’un nouveau facteur
et d’un nouveau facteur  uniquement dépendant du dimensionnement caractéristique.
uniquement dépendant du dimensionnement caractéristique.
Cela nous permet de tracer le rapport  comme une fonction de avec Python :
comme une fonction de avec Python :

Le fait que la courbe soit au-dessus de 1 est cohérent avec notre modélisation puisque  : la courbe doit être au moins aussi grande que l’espace qu’il y a entre les poteaux. L’équation
: la courbe doit être au moins aussi grande que l’espace qu’il y a entre les poteaux. L’équation  permet également d’étudier le comportement aux limites de cette fonction.
permet également d’étudier le comportement aux limites de cette fonction.
- Cas
 :
:
Comme  ,
,  , et avec
, et avec  :
:
![\[L \underset{\rho \to 0}{\sim} D \frac{\sinh (x_\rho )}{x_\rho} \sim D \frac{x_\rho}{x_\rho} \sim D\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-e030adab88c74a757cc5353c0771b01a_l3.png "Rendered by QuickLaTeX.com")
Physiquement, si  pour fixe, l’aplatissement
pour fixe, l’aplatissement  ce qui traduit que pour des poteaux très éloignés la courbe s’aplatit en une corde tendue horizontalement, d’ou encore
ce qui traduit que pour des poteaux très éloignés la courbe s’aplatit en une corde tendue horizontalement, d’ou encore  .
.
- Cas
 :
:
Inversement, comme  et que alors
et que alors  .
.
En remarquant que :
![\[\frac{\sinh (x)}{x} \underset{x \to \infty}{\sim} \phi (x)\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-2f2af11a7c2bfd48dba43a0af3da6679_l3.png "Rendered by QuickLaTeX.com")
on obtient en composant les équivalents par la droite que :
![\[\frac{\sinh (x_\rho)}{x_\rho} \underset{\rho \to \infty}{\sim} \rho\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-6a66af34e8da025c56b7e87d0c56cb16_l3.png "Rendered by QuickLaTeX.com")
On retrouve le comportement asymptotique linéaire :  . Physiquement on a cette fois-ci un aplatissement qui tend vers 0, traduisant une corde « en coude », avec une descente suivie d’une remontée toutes deux quasi verticales, ce qui justifie que
. Physiquement on a cette fois-ci un aplatissement qui tend vers 0, traduisant une corde « en coude », avec une descente suivie d’une remontée toutes deux quasi verticales, ce qui justifie que  .
.
4. Développements
a) Cas général pour différentes flèches
Le travail mené nous permet d’étendre la résolution ou la flèche ne serait pas forcément à mi-hauteur, mais pour n’importe quel cas. En effet, en prenant  avec
avec  , l’équation de la flèche devient alors :
, l’équation de la flèche devient alors :
![\[\phi \left( \frac{d}{a} \right) = 2 \kappa \rho\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-879da8828ef5b15bd7b8f9ea40dc0052_l3.png "Rendered by QuickLaTeX.com")
Le rapport  satisfaisant cette équation se déduit par homothétie du cas
satisfaisant cette équation se déduit par homothétie du cas  précédemment étudié :
précédemment étudié :
![\[x_\rho^{\kappa} = x_{\rho'} \text{ avec } \rho' = \frac{\rho}{2\kappa}\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-12bfb12ea7f11080f15f47fe2bde349e_l3.png "Rendered by QuickLaTeX.com")
Voici les courbes obtenues pour le rapport en fonction de pour différentes valeurs de  :
:
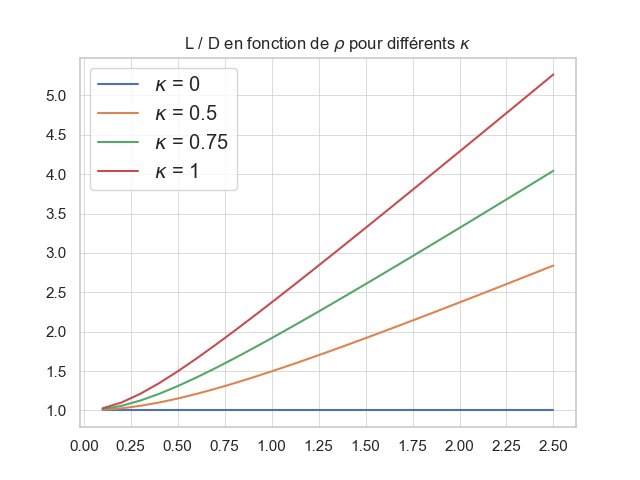
Pour  , la flèche doit se situer à hauteur des poteaux est donc la corde est horizontale, donc
, la flèche doit se situer à hauteur des poteaux est donc la corde est horizontale, donc  .
.
Le cas  est plus fécond. Ce cas exprime la dimension critique de chaine au moment ou elle commence à toucher le sol. On peut voir la figure ci-dessus comme un encadrement du cordage possible :
est plus fécond. Ce cas exprime la dimension critique de chaine au moment ou elle commence à toucher le sol. On peut voir la figure ci-dessus comme un encadrement du cordage possible :
![\[1 = \frac{L}{D} (\kappa = 0) < \frac{L}{D} < \frac{L}{D} (\kappa = 1)\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-e66131cd34fc1d6f162212ae3c131251_l3.png "Rendered by QuickLaTeX.com")
Ainsi, pour  , c’est à dire un espacement des poteaux égal à leur hauteur, il faut sélectionner une corde dont la longueur est au plus de
, c’est à dire un espacement des poteaux égal à leur hauteur, il faut sélectionner une corde dont la longueur est au plus de  pour éviter qu’elle ne touche le sol.
pour éviter qu’elle ne touche le sol.
b) Problème dual
On pourrait s’intéresser au cas « dual », celui ou la chaine est cette fois-ci d’une longueur fixe donnée et les poteaux sont mobiles. On cherche alors à estimer l’espacement nécessaire des poteaux de sorte à garantir un niveau de flèche. C’est par exemple le cas du vigile de cinema qui déplace des potelets.
En posant  , la résolution est simplifiée par l’identité remarquable suivante :
, la résolution est simplifiée par l’identité remarquable suivante :
![\[l^2 - f^2 = 2af\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-cac3fd5b13fc99a7a8c9d0a575e35a0e_l3.png "Rendered by QuickLaTeX.com")
Démonstration : On réutilise les équations de la longueur et de la flèche trouvées dans la partie précédente.
![\begin{align*} l^2 - f^2 &= a^2 \sinh^2 \left(\frac{d}{a}\right) - a^2 \left[ \cosh\left(\frac{d}{a}\right) -1\right]^2 \\ &= a^2 \left[ \sinh^2 \left(\frac{d}{a}\right) - \cosh^2 \left(\frac{d}{a}\right) + 2 \cosh \left(\frac{d}{a}\right) - 1 \right] \\&= a^2 \left[ - 1 + 2 \cosh \left(\frac{d}{a}\right) - 1 \right]\\&= 2 a^2 \left[ \cosh \left(\frac{d}{a}\right) - 1 \right] \\&= 2 a f\end{align*}](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-335a9b9d8b9d71d725f6cdfcbd98dd7a_l3.png "Rendered by QuickLaTeX.com")
On a notamment utilisé entre les lignes 2 et 3 l’identité de trigonométrie hyperbolique  .
.
Puisque  et dont des données du problème, on peut donc évaluer :
et dont des données du problème, on peut donc évaluer :
![\[a = \frac{l^2 - f^2}{2f}\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-11b7156742f806e8673459eef0abb8ef_l3.png "Rendered by QuickLaTeX.com")
Puis en inversant l’équation de la flèche :
![\[d = a \operatorname{Argcosh} \left(\frac{a+f}{f} \right)\]](https://nilradical.fr/wp-content/ql-cache/quicklatex.com-a2c0487810b4b1a231cb5db2dc31b037_l3.png "Rendered by QuickLaTeX.com")
5. Conclusion
Les caténaires sont des courbes dont on ne peut sous-estimer la portée. En conclusion, il est fascinant de constater qu’à partir de simples exemples issus du quotidien peuvent surgir des notions complexes de calcul différentiel.
Laisser un commentaire